
Sistema Cartografico – Sensori – Allarmistica – Meteo
[La versione aggiornata del progetto e’ visibile qui: Progetto Cartografico con Raspberry PI2]
Desiderata
– Sistema low power e low cost, utilizzando l’hw gia’ presente in barca (strumenti seatalk, GPS Garmin e VHF/AIS Radio)
– Sistema cartografico opensource collegato agli strumenti della barca (GPS, AIS, Seatalk) fruibile da tablet, smartphone e pc via wifi, anche contemporaneamente, via VNC oppure direttamente tramite lcd touch screen.
– Sistema di routing quando connessi via wifi all’odroid, tramite connessione 3G condivisa tra i device. Utile quando si prende una scheda SIM dati per esempio all’estero
– Sistema di monitoraggio ambientale (Temperatura, Pressione e umidita’) ed allarmastica per gas H rilasciato da batteria in carica, GPL e temperatura batterie.
– Sistema di allarmistica in caso di spostamento barca, basato su dati gps e profondimetro
– Sistema di ricezione navtex
– Monitoraggio da remoto posizione barca
Hardware e connessioni
– Odroid U3 (C1, Raspberry PI2) collegato a :

- Bridge nmea per lettura dati seatalk e gps. Il Bridge e’ collegato via seatalk agli strumenti raymarine della barca e all’input nmea al GPS. Viene preso anche il dato dal GPS per poter funzionare la sensoristica ed
 allarmistica con VHF spento, per esempio durante la notte. L’output nmea e’ collegato al RS232 – USB che va all’odroid.
allarmistica con VHF spento, per esempio durante la notte. L’output nmea e’ collegato al RS232 – USB che va all’odroid.
- Uscita NMEA Radio VHF Navicom 650 per GPS e AIS via cavo USB RS232 collegato all’Odroid.
- Gps Garmin collegato simultaneamente a radio VHF e bridge NMEA
- USB WiFi
- HUB USB alimentato
- touchscreen lcd 10”
- Ricevitore Navtex Nasa Marine collegato via cavo USB – RS232

- Xbee radio, via cavo USB

- Batteria di backup per RTC
- Modem UMTS Huawei
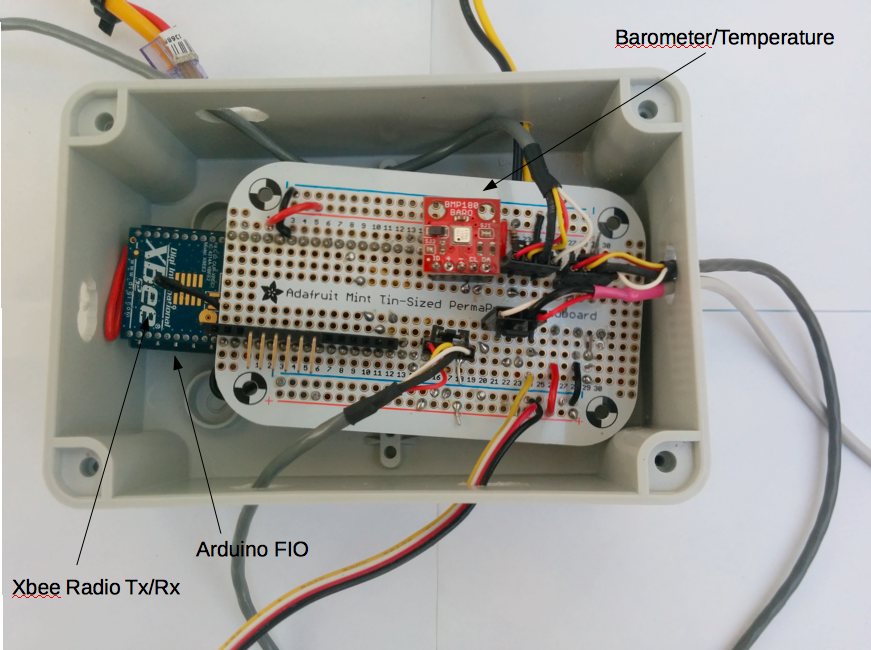
– Stazione Remota basata su Arduino FIO e Xbee:
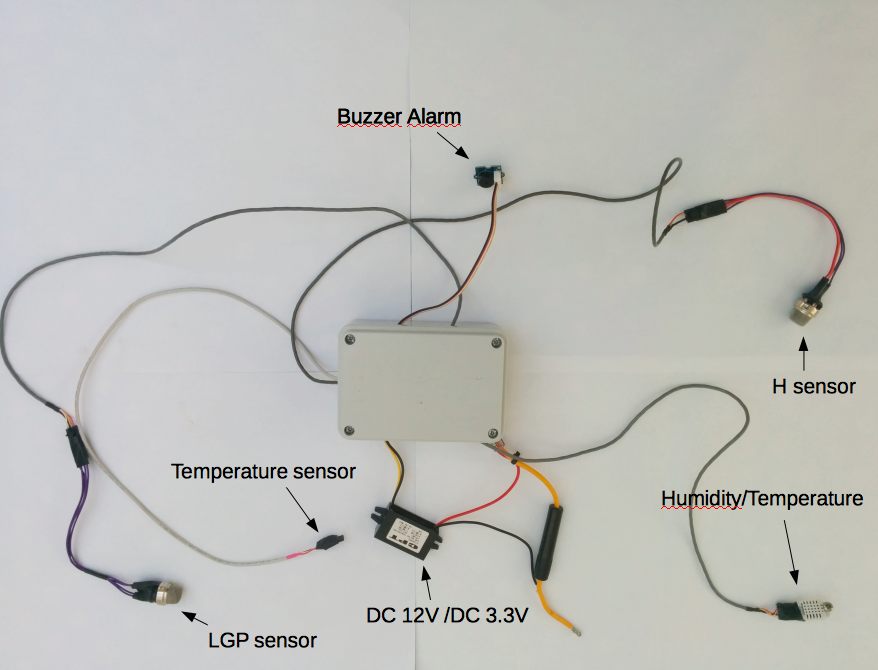
- sensore di temperatura e humidita’ DHT22
- sensore pressione e temperatura BMP180
- sensore H
- sensore GPL
- Buzzer
- Xbee
– HW alimentato direttamente dai 12V batterie servizi tramite questi alimentatori/trasformatori:
Software Server Odroid U3
- Sistema operativo ubuntu. Servizi attivi al boot: server web, gpsd, autologin con opencpn, VNC server, hot spot (dnsmasq, dhcp server), programma lettura dati sensori remoti, programma lettura dati via gpsd, connessione USB 3G/UMTS, programma sync con il server remoto, VPN client per collegamento da remoto.
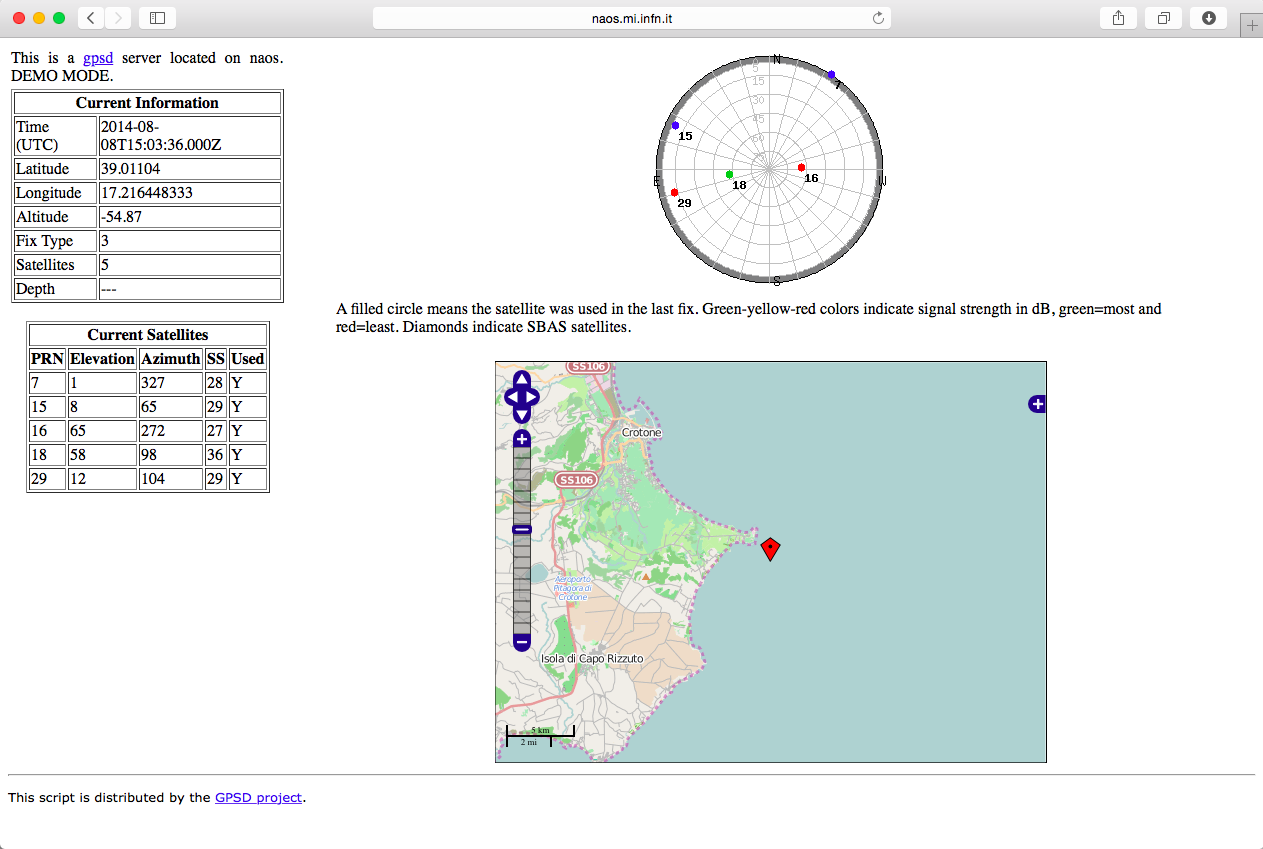
- GPSD che legge la seriale alla quale e’ collegato il bridge (quindi dati GPS e strumentazione barca via Seatalk) con anche pagina web visualizzazione stato. Viene usato GPSD in quanto i dati di questa seriale occorrono a diversi programmi, sia opencpn che i miei in python.
- Mysql database che ospita due tabelle, una per i dati correnti e l’altra per l’archivio.
- Programma in python, read_gpsd.py, per collezionare i dati letti da GPSD (direzione e velocita’ vento, profondita’ e temperatura mare, latitudine e longitudine) e popolare DB Mysql.
- Programma in python, read_satellite.py, per collezionare i dati letti via Xbee dal satellite (temperature varie, pressione e umidita’) e popolare DB Mysl.
- Programma sync in crontab, script_copy_odroid, che sincronizza DB locale con DB remoto
- I dati vengono visualizzati tramite una pagina web basata su mesowx: Naos RealTime WeeWX
- Opencpn configurato per ricevere dati da GPSD (dati GPS e strumentazione barca) e seriale in arrivo da VHF (con AIS, GPS)
- Access point wifi, con DHCP e DNS
- Connessione 3G con wvdial con pagina web monitoraggio traffico dati via vnstat e routing per I device connessi via wifi,
- Programma in python per ricevere via seriale I bollettini navtex e pagina web per visualizzarli
- Replica dati su server con ip pubblico. Viene replicato il db mysql. Sia per una visualizzazione remota, sia per il monitoraggio/allarmistica da remoto ed infine come backup remoto.
- vnc server per consentire visualizzazione da remoto di opencpn
- openvpn client per permettere al server remoto di collegarsi.
Pagina web su server ip pubblico (visibile su internet sempre)
- Visualizzatore pagina web con GPSD tramite VPN. In questo modo si vede anche se la barca si e’ spostata in caso di ancoraggio o ormeggio, tramite la mappa integrata.
- Monitoraggio sensori tramite pagina web basata su mesowx (come odroid) sul db replicato sul server pubblico.
- Programma che dalla latitudine e longitudine presa dal DB crea un file gpx da usare con google maps per visualizzazione mappa google dove siamo in quasi real time

- Ultimo bollettino Navtex ricevuto.
Software Satellite
Per consumare il meno possibile, si iberna sia arduino che xbee e ogni 8 secondi si sveglia e legge barometro, temperatura, sensore GPL, sensore H, temperatura batteria, temperatura cabina e umidita’ e li invia via Xbee all’odroid. Nel caso di problemi suona il buzzer
Allarmistica (da completare)
– Anchor watch con profondimetro e posizione.
– Allarme se velocita’ vento sopra una certa soglia o se gira di un certo angolo
– Fuga gas GPL
– Fuga gas H
– Temperatura batteria sopra certa soglia
L’allarme puo’ essere inviato in diversi modi: sonoro in barca, via sms, via mail.
Client locale
- connesso al SSID naos
- vnc client (vncviewer, pocketcloud, …) per visualizzare opencpn
- browser sul server privato
Client remoto
- browser sul server pubblico (attualmente http://naos.mi.infn.it)
TODO
- webcam con motion per controllo barca all’ancora e barca in porto.
- Piccolo LCD come reapeter dati seatalk e sensori
- Allarme sia AIS che ancora con buzzer
- monitoraggio consumo elettrico attaccandomi alla shunt del battery monitor
- monitoraggio caricabatterie quick
- Avendo gia’ un televisore con un raspberry con Raspbmc, provare directVNC per visualizzare opencpn di odroid
- ntp sincronizzato via GPS